Unser Simulationsmodell:
Was steckt dahinter?
Das wissenschaftliche Modell ist das Herzstück jeder Simulationssoftware. Je genauer ein solches Modell das reale Bewegungsverhalten abbilden kann, desto genauer werden die Ergebnisse sein. In vier Schritten kommt man von der Theorie zum validierten Simulationsmodell.
Das Optimal Steps Model (OSM) beschreitet neue Wege: statt auf vorhandene Modelle aus anderen Disziplinen aufzusetzen, fokussiert es sich auf den Grundgedanken jedes Personenstromsimulators: das menschliche Bewegungsverhalten. Ausgangspunkt ist der Schritt, den ein Mensch aufgrund seiner Schrittlänge in Abhängigkeit von der Gehgeschwindigkeit und der Laufrichtung machen kann, ohne mit Hindernissen oder anderen Personen zu kollidieren. Es wird jeder Schritt neu errechnet und die Gehgeschwindigkeit jeweils den Gegebenheiten der Umwelt angepasst.
Die Fortbewegung allein ist jedoch nicht ausreichend, um Bewegungsverhalten realistisch abzubilden. Ebenso in die Analyse einfließen muss die Umwelt. Hierfür müssen Erkenntnisse aus der Sozialpsychologie und die Techniken zur Modellierung von Verhalten aufeinander abgestimmt werden. Um menschliches Bewegungsverhalten zu verstehen, müssen die folgenden Fragen beantwortet werden: Wie bewegt sich eine Person fort? Welche persönlichen Eigenschaften besitzt sie? Und wie interagiert die Person mit der Umwelt?
Um diese drei Aspekte in einer Simulationssoftware abbildbar zu machen, haben wir sie in drei Modellierungsebenen übersetzt:
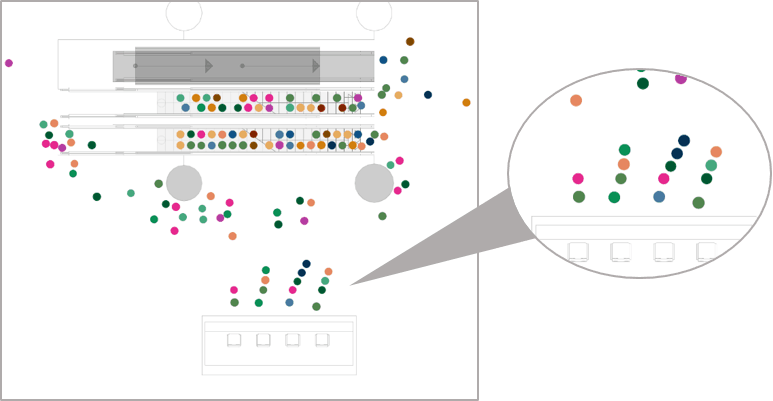
Lokomotionsebene

OSM: Kontinuierliche Geometrie: jeder Punkt ist betretbar
In crowd:it ist die Lokomotionsebene wie folgt angelegt:
Kontinuierliche Geometrie
- Die Agenten sind frei in der Bewegungsrichtung.
- Alle Details des Plans bleiben erhalten, runde Objekte können abgebildet werden. Dadurch werden gefährliche Artefakte vermieden.
Dynamisches Navigationsfeld
- In jedem Zeitschritt überlegen die Agenten, welche Route unter den gegebenen Umständen die beste ist.
- Sie betrachten andere Akteure als Hindernisse und können je nach Situation über den längeren, aber letztlich schnelleren Weg entscheiden.
Optimal Steps Model
- Das Modell imitiert den echten Schritt von Fußgängern.
- Das zugrundeliegende Optimal Steps Model ermöglicht ein reales Fußgängerschrittverhalten. Agenten verlangsamen sich auf natürliche Weise, wenn sie sich innerhalb dichter Menschenengen befinden, indem sie kleinere Schritte unternehmen. (Daher ist keine Dichte-Geschwindigkeitsbeziehung als Eingabe erforderlich. Siehe auch hier)
Vertikale Verbindungselemente
Im Gegensatz zu anderen Modellen, werden in crowd:it Treppen mit ihren individuellen Eigenschaften wie Anzahl Stufen oder Stufentiefe explizit modelliert. In anderen Programmen werden Treppen als Bereiche modelliert, bei denen sich die Gehgeschwindigkeit für alle Agenten um einen bestimmten Faktor verlangsamt. Aufgrund der verringerten Schrittweite auf Treppen werden aber schnellere Personen im Verhältnis eher stärker abgebremst als langsamere Personen. Eine lineare Skalierung ist also nicht exakt (vgl. (10)). Im Treppenmodell von crowd:it, dem Optimal Stair Model, wird dieser Erkenntnis Rechnung getragen. So werden Personen auch anhand der Treppenstufentiefe abgebremst und nicht ausschließlich in Abhängigkeit ihrer Geschwindigkeit in der Ebene.
Auch bildet das crowd:it Optimal Stair Model die Erkenntnis ab, dass Personen Treppen eher gerade heruntergehen und schräge Wege auf Treppen vermeiden. Dies ist der Tatsache geschuldet, dass beim Schräggehen von Treppen das Risiko erhöht wird, die Treppenstufe nicht exakt zu treffen und so im schlimmsten Fall einen Sturz verursacht wird. In herkömmlichen Modellen kommt es oftmals zu einen Zickzack-Lauf von Agenten. Dies hat Auswirkungen auf die Raumeinnahme einer einzelnen Person und bildet somit den Durchfluss auf Treppen nicht exakt ab.
In crowd:it können Festtreppen, Fahrtreppen und Aufzüge direkt modelliert werden geben damit realistischere Ergebnisse aus.
Individualebene
Die Individual- oder Verhaltensebene beschreibt die motorischen und kognitiven Fähigkeiten und Eigenschaften jeder Person wie den Platzbedarf, die Wunschgeschwindigkeit, Mobilität, Ortskenntnis sowie individuelle Pläne, also das persönliche Vorhaben an einem speziellen Ort. Orte, die besucht werden, können als sog. Points of Interest abgebildet werden.
Individualebene in crowd:it:
- Jeder Agent hat einen individuellen Plan und persönliche Eigenschaften.
- Durch die Anwendung vorselektierter Heuristiken interagieren die Agenten individuell mit Raum und Ereignissen (z.B. nehme den kürzesten Weg vs. den schnellsten Weg, den Ort mit dem meisten freien Platz, der Schlange mit der kürzesten Wartezeit etc.). Das bringt Flexibilität - modellieren Sie einfach verschiedene Situationen, von der Planung bis zur Räumung.
Wie können individuelle Pläne in crowd:it angelegt werden?
Die Agenten „arbeiten“ eine Liste aus sogenannten Points of Interest (PoIs) ab. Sobald sie ein Point of Interest erreicht haben und dort ihre Aufgabe erledigt haben (z.B. die Treppe hochgelaufen sind, die Wartezeit abgelaufen ist etc.), steuern sie zum nächsten PoI. Abhängig der gewählten Heuristik werden die nächsten PoIs gewählt. So haben wir eine sehr flexible und simple Architektur geschaffen, um sehr unterschiedliche Anwendungsfälle abzubilden und dem Benutzer die Möglichkeit zu geben, die Population so modellieren, wie es für den Anwendungsfall bzw. das Szenario am sinnvollsten ist.
Damit können auch andere Faktoren abgebildet werden, wie z.B. Ortskenntnis von Personen, indem man den Personen mit Ortskenntnis die Heuristik „schnellster Weg“ zuordnet, den Agenten ohne Ortskenntnis die Heuristik „kürzester Weg“ oder ihnen den Weg als Ausgang zuordnet, über den sie das Gebäude betreten haben.
Welche Eigenschaften haben Agenten und welche kann ich anpassen?
Den Agenten werden normalverteilt Standardwerte automatisch vergeben zu grundsätzlichen Parametern wie der Gehgeschwindigkeit, Größe oder Platzbedarf. Diese wurden in Experimenten und Studien ermittelt (z.B. in (12)) und bilden die Grundlage unserer Personenstromanalysen (s. u. Literaturliste). Diese Standardwerte wurden ausreichend validiert und sind Konsens in wissenschaftlichen Fachkreisen (vgl. (11),(17)). Hat man jedoch eine spezifische Population, die von diesen Standardwerten abweichen (z.B. Kindergartengruppe, Mobilitätseingeschränkte etc.), können die Werte angepasst werden.
Interaktionsebene
Die Interaktionsebene bildet die soziale Interaktion mit der Umgebung und anderen Personen ab. Jede Interaktion von Personen untereinander oder mit der Umwelt wird in dieser Ebene abgebildet (bspw. Schlangenbildung, Wartebereiche, Gruppenverhalten). Zudem werden ortsspezifische Abläufe abgebildet (z.B. Fahrpläne oder sicherheitsrelevante Prozesse).
- Es können beliebig viele Agenten, Routen und Merkmale kombiniert werden.
- Unsere Agenten reflektieren das reale menschliche Verhalten, vermeiden Kollisionen und Hindernisse und suchen den einfachsten Weg zum Ziel. Staus, Spurbildung und ineffiziente Fußgängerführung werden so realitätsnah dargestellt.
Modellierung im Computer
Im Bereich der Personenstromsimulation sind vor allem zwei Aspekte wichtig: Wie bewege ich mich im Raum und wann bewege ich mich, also räumliche und zeitliche Entscheidungen. Hierbei unterscheidet man zwischen einer diskreten bis hin zu einer quasi-kontinuierlichen Abbildung:
Warum quasi-kontinuierlich? Da jeder Computer nur diskret rechnen kann (jede Berechnung wird im Takt des Prozessors ausgeführt) findet zwangsläufig für jedes Computerprogramm der Welt eine zeitliche Diskretisierung statt. Selbes gilt auch für die räumliche Diskretisierung: Die in der Realität vorhandene Kontinuität kann von den Computern nur angenähert werden.
Der Grad der Auflösung ist aber unterschiedlich hoch. Während manche Modelle die Geometrie zellbasiert auf Agentengröße auflösen, also noch recht grob sind, gibt es andere Modelle (wie z.B. crowd:it), deren Standardauflösung durch Interpolation von 10cm entfernten Stützstellen quasi-kontinuierlich ist. Die Einstellung der Stützstellen kann individuell eingestellt und einfach per Klick erhöht werden.
Für die Abbildung der zeitlichen Entscheidung gibt es ebenfalls unterschiedliche Genauigkeiten. Entweder das Modell weist allen Agenten einen festen Zeitpunkt zu, in dem jeder einen Schritt machen darf (üblicherweise mehrmals pro Sekunde) oder ein Agent kann jederzeit entscheiden, dass er gehen möchte. Erster Fall wird in Modellen umgesetzt, die auf Differentialgleichungen basieren. Diese Gleichungen werden zu jedem Zeitpunkt dann neu ausgewertet (z.B. Social Force Modelle). Wir haben diese Entscheidung nun von synchonisierten Zeitschritten zu individuellen Zeitschritten umgestellt. Denn so funktioniert die Realität: Menschen entscheiden ohne global tickende Uhr, wann sie einen Schritt machen. So schaffen wir es, menschliches Verhalten noch besser abzubilden und mehr Realität in die Simulation zu bekommen. Unsere Software kann einen weiteren Aspekt aus der Realität in die Modellwelt überführen.